You've Reached the Center of the Internet
It's a blog
Solving O'Gear Brain Teaser with Haskell Graph Search
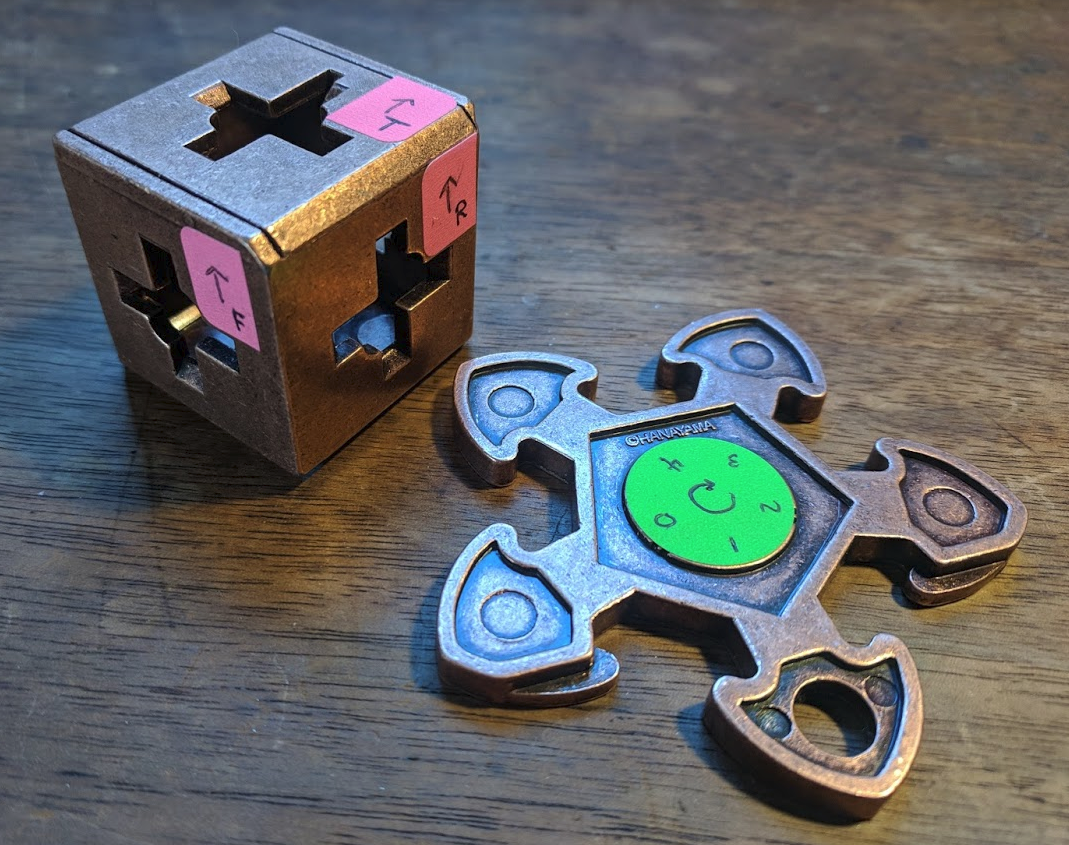
Declan showed me a brain teaser his friend sent him. Apparently, it's known as the Hanayama O'Gear Puzzle. It consists of a bronze colored metal cube with a captive gear which can roll from face to face on the cube. The gear can also rotate between two directions on each face. Some edges of the cube are made so that the gear can't roll over them. One tooth of the gear and one face of the cube have a special cut-out. Only when the special tooth is engaged with the special face can the gear be freed. The object of the puzzle is to manipulate the gear into this orientation. Here's a video of the puzzle in action.
I tried solving the puzzle for about fifteen minutes before deciding to use a computer. My basic strategy was to treat the problem as a graph search, where the nodes of the graph are the different states the cube and gear can be in. At any time, you can only do three things: rotate, roll forward, and roll backward. I figured that the limited set of moves and possible positions would prevent the search space from getting too big.
I marked up the cube with stickers, naming each face and defining its 'north' direction. I also marked the gear by labeling each tooth and setting a forward rotation direction.
I don't know Haskell very well, so I thought using it would be a fun challenge. Plus, I had Haskell guru Phil to ask for help and advice. A lot of the code is just defining the connectivity of the puzzle. I used a list to keep track of the links between different faces and a pattern-matched function to keep track of the possible rotations. I defined north on each face so that these rotations were always the same. A north-facing gear could only rotate to the east, and a south-facing one could only rotate west.
Beyond the trickiness of defining directions and connectivity, I just implemented a straightforward breadth-first search. The program creates a list of all states accessible from the starting state. Because the list is generated with successive expansions of the search frontier, it is naturally sorted by search depth. I take advantage of Haskell's lazy evaluation, creating an infinite list of accessible states but only ever calculating a few of them. Code below.
import Data.Maybe (catMaybes)
import Data.List (find)
import Data.Tuple (swap)
data Face = Top | Bot | Lef | Ri | Front | Back deriving (Show, Eq)
data Dir = North | South | East | West deriving (Show, Eq)
data GearState = GearState{ face :: Face, dir :: Dir, tooth :: Int, history :: [(Face, Dir)] } deriving Show
-- a list defining connections between faces
forward_connections =
[ ((Top, East),(Ri, South))
, ((Top, West),(Lef, South))
, ((Bot, North),(Front, West))
, ((Bot, South),(Back, East))
, ((Bot, West),(Ri, North))
, ((Front, South),(Bot, North))
, ((Front, West),(Back, West))
, ((Back, South),(Bot, North))
, ((Back, East),(Ri, East))
, ((Back, West),(Lef, West))
, ((Lef, North),(Top, East))
, ((Lef, East),(Front, East))
, ((Lef, West),(Back, West))
, ((Ri, North),(Top, West))
, ((Ri, South),(Bot, East))
, ((Ri, East),(Back, East))
]
-- mapping the reverse tuple function over the connections gives the connections for reverse gear moves
backward_connections = map swap forward_connections
-- a function which returns a gear moved forward or backward
-- takes a list of connections between faces and a function for finding the next tooth
-- forward_connections and incr for forward moves
-- backward_connections and decr for backward moves
move :: GearState -> [((Face, Dir),(Face, Dir))] -> (Int -> Int) -> Maybe GearState
move (GearState face dir tooth history) connections nextTooth =
case (lookup (face, dir) connections) of -- looks for a connection
Nothing -> Nothing -- if no forward connection exists from the current state
(Just (new_face, new_dir)) -> Just (GearState new_face new_dir (nextTooth tooth) ((new_face,new_dir):history)) --
returns a new state, incrementing the tooth and adding to the history
-- a function which applies a turn to the gear
turn :: GearState -> GearState
turn (GearState face North tooth history) = GearState face East tooth ((face,North):history)
turn (GearState face East tooth history) = GearState face North tooth ((face,East):history)
turn (GearState face South tooth history) = GearState face West tooth ((face,South):history)
turn (GearState face West tooth history) = GearState face South tooth ((face,West):history)
-- some mod 5 math for the teeth
mod5 :: Int -> Int
mod5 = (flip mod) 5
incr :: Int -> Int
incr x = mod5 (x+1)
decr :: Int -> Int
decr x = mod5 (x-1)
-- determines if the gear can leave the cube
isWinningState :: GearState -> Bool
isWinningState (GearState Top North 0 _) = True
isWinningState _ = False
-- creates a list of all the states accessible from the current state
nextStates :: GearState -> [GearState]
nextStates state = catMaybes [Just (turn state), (move state forward_connections incr), (move state backward_connections
decr)] -- removes Nothings and strips the values out of Just
-- creates a new search frontier by replacing each state in the search frontier with all the states accessible from that
state and flattening
newFrontier :: [GearState] -> [GearState]
newFrontier frontier = (concatMap nextStates frontier)
-- creates a list of all future frontiers
reachableStates :: GearState -> [GearState]
reachableStates start = concat (iterate newFrontier [start])
-- finds the winning state
solve :: GearState -> Maybe [(Face, Dir)]
solve start = fmap history (find isWinningState (reachableStates start))
You can run it with a command like, solve (GearState Top South 4 []). This code, and a different Python
solver I wrote are available in my Github.